How Our JEO Joint Motor Redefines Industry Standards: Lightweight Design, High Torque, and Unmatched Durability
How Our Motor Redefines Industry Standards: Lightweight Design, High Torque, and Unmatched Durability
Apr 24,2025
In robotics, aerospace, and portable equipment, traditional motors—including standard AC motorsbasic Steppermotors, and conventional Gearmotors—struggle to balance lightweight design, high torque, and long-term durability. This gap is critical in Humanoid Robot & Motor development, where the core humanoid robot joint motor demands versatility.
Excessive eddy current loss causes heat buildup, cutting efficiency and shortening component lifespans (e.g., Motor couplers, Rotary Actuators). Bulky structures limit Joint motor robot portability and restrict use cases for Bionic robot joint motor and Shoulder Joint Motor. Even advanced types like basic Servo motors or standard Brushless DC motors fail to meet modern needs, creating urgent demand for optimized Joint motor design.
As a leading Joint motor manufacturer, we address these pain points with innovations across four core areas:
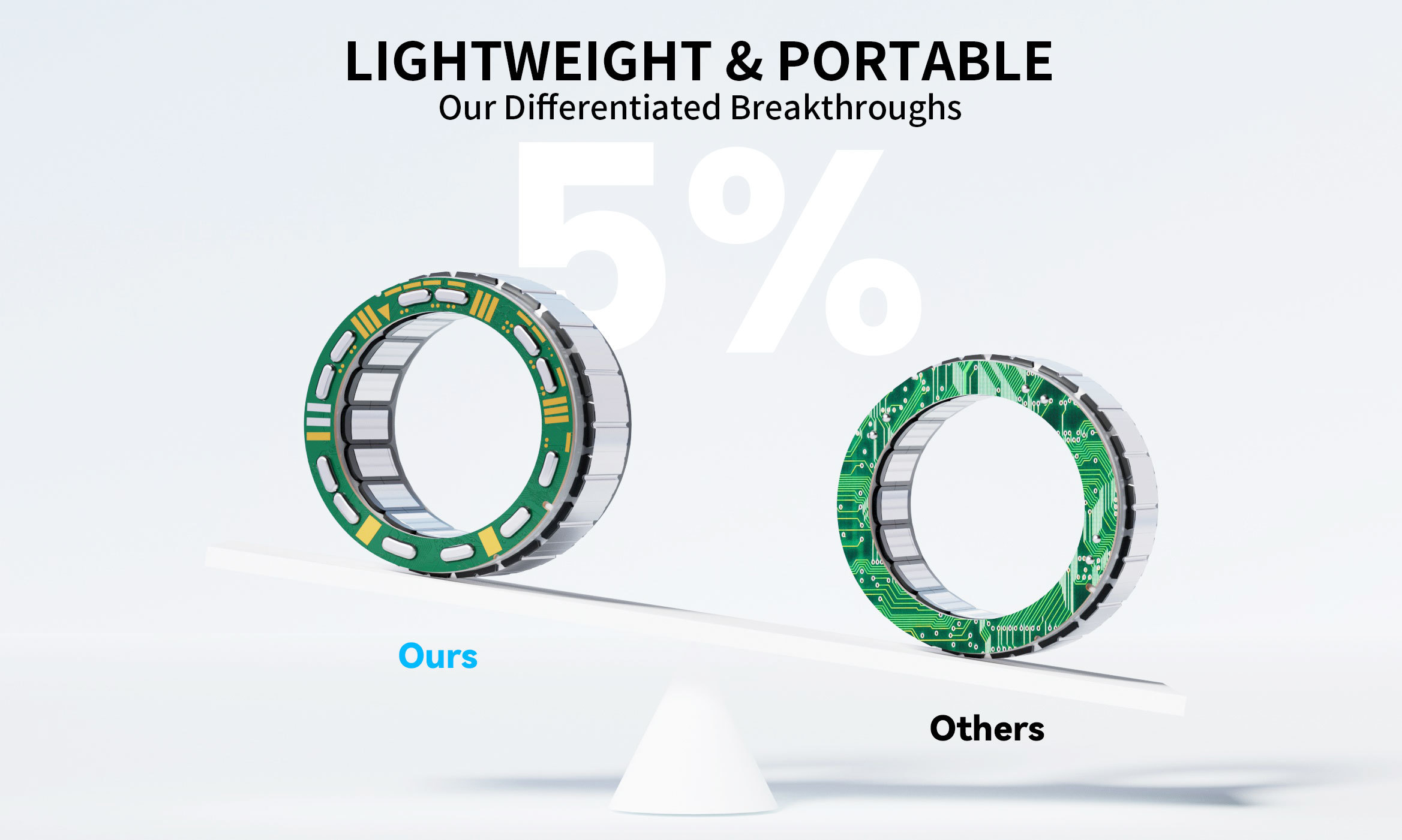
Lightweight & Portable: For Compact Joints
“Via innovative structural engineering and advanced materials, our motors—Frameless Torque Motors, DC Hollow cup motors, Coreless Motors—achieve [5]% weight reduction vs. traditional Synchronous motors or heavy Gear motors. Optimized magnetic circuits (based on Coreless Motor tech) and lightweight composites ensure portability without performance loss.
Ideal for space-constrained scenarios: Bionic robot joint motor integration, Shoulder Joint Motor powering, and Robot joint module motor miniaturization—boosting Joint motor robot agility.”
High Torque Density & Sensitivity: For High-Load Tasks
“With optimized copper fill ratio and advanced magnetic design, our High torque density robot joint motors (Brushless DC Motors, precision Servo Motors) deliver industry-leading torque density. Dynamic tests show 20% higher torque vs. standard Stepper Motors/AC motors, and [5]% faster response than traditional Motor coupler-driven systems.
Transformative for demanding use cases: Humanoid Robot & Motor terrain navigation, High-Performance Robotic Actuators precision, and heavy-duty Robot joint actuator deployment. See details at JEO Motor Solution Hub.”
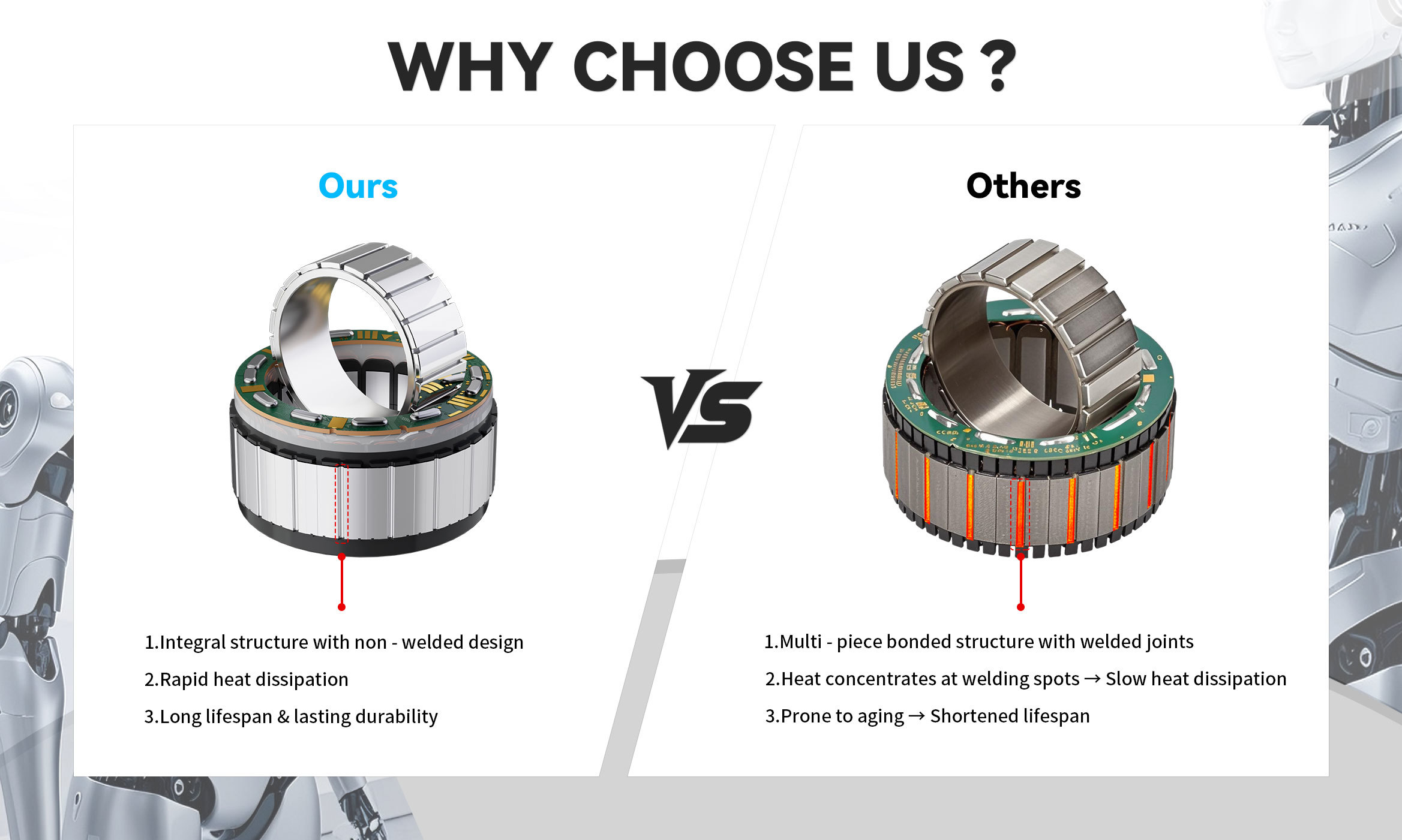
Low Eddy Current Loss & Rapid Heat Dissipation: For Stability
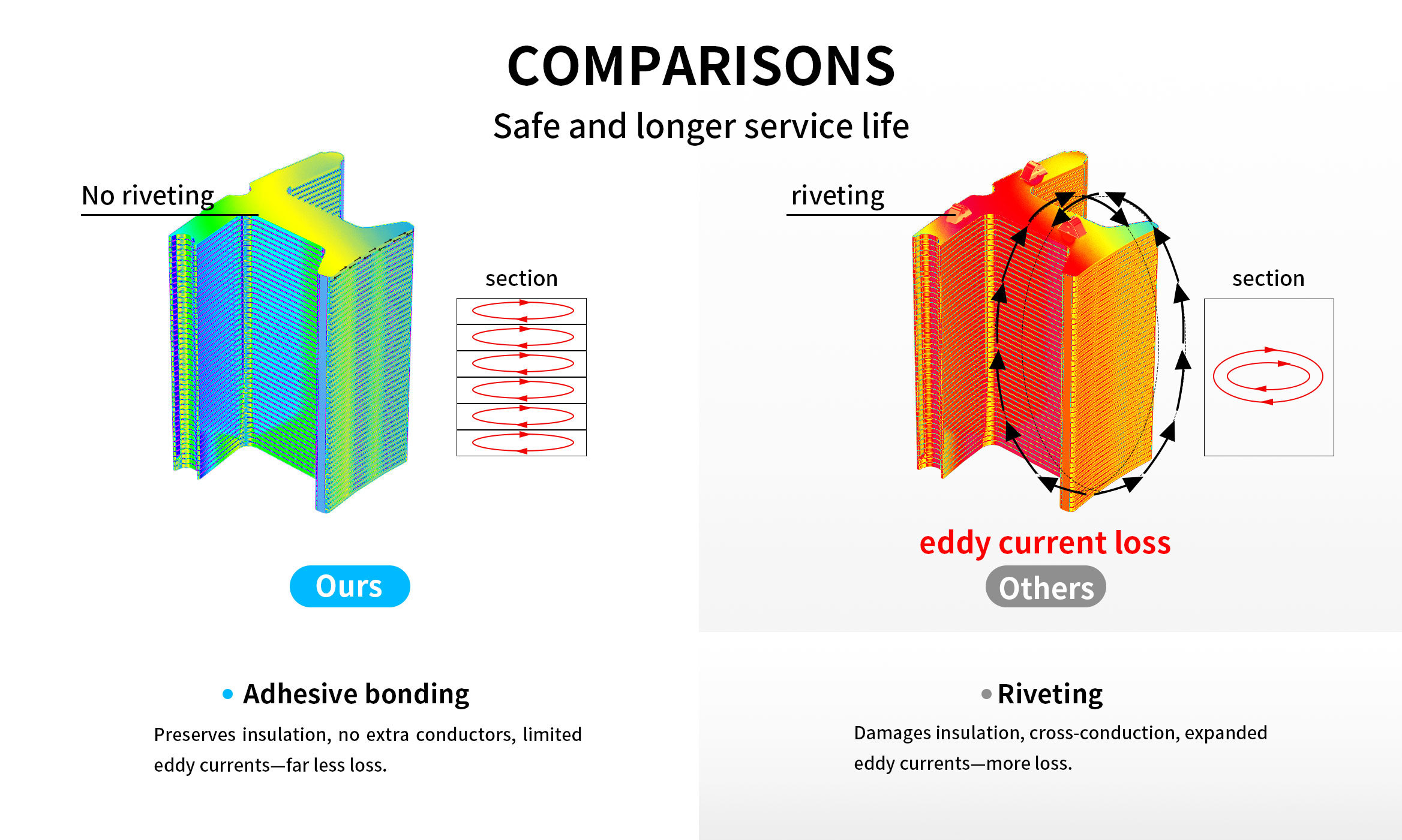
“Innovative winding topology and integrated thermal management cut eddy current loss by 5% in our Direct Drive Linear and Rotary Motors/Frameless torque motors vs. traditional Rotary Actuators/Harmonic Robot Joint Actuators. Thermally conductive materials and optimized paths boost heat dissipation efficiency by 11%, eliminating overheating in long-running Smart motors and Rotary Actuator Joint Module assemblies. Learn more at JEO Motor Technical News.”
Long-Lasting Durability: For Lower Total Cost
“Reduced thermal stress, minimal eddy current loss, and robust design extend lifespan across our lineup: Brushless DC motors, Robot joint actuators, Frameless Torque Motors. Field tests confirm 3x longer service life for our humanoid robot joint motor/Frameless torque motors vs. conventional models.
This cuts maintenance costs and total ownership cost for Joint motor robot operators. Get customized durability data via JEO Motor Service Portal.”
We integrated our specialized humanoid robot joint motor (hybrid Brushless DC Motors/Harmonic Robot Joint Actuators) into a high-performance Humanoid Robot & Motor to fix critical gaps.
Pre-Integration Issues
The robot relied on traditional Gear motors/Rotary Actuators, causing:
Zero overheating (thermal management aligned with Direct Drive Linear and Rotary Motors standards) → 24/7 operation.
Long-Term Validation
3 months of continuous use (walking, grasping, dynamic movement) saw no failures in Robot joint motor, Rotary Actuator Joint Module, or adjacent systems—cutting annual maintenance costs by 15%. See more cases at JEO Motor Systems .
Our motors—Smart motors, Frameless torque motors, humanoid robot joint motors, High-Performance Robotic Actuators—redefine standards by resolving lightweight/high-torque/durability tradeoffs. These innovations address Joint motor design needs for Bionic robot joint motor, Shoulder Joint Motor, and Joint motor robot applications.
As efficiency/portability/reliability demands grow, JEO sets a new benchmark for next-gen Robot joint actuator tech. We’ll continue advancing Joint motor design to empower smarter systems across industries.