
Pharmacy automation
Application Case Scenarios of Joint Motors in Humanoid Robots and Assisted Medical Surgery
Joint motors play a pivotal role in advancing the capabilities of humanoid robots and transforming assisted medical surgery.
Apr 24,2025



Surgical tools

Medical ventilation

Dental devices

Medical imaging

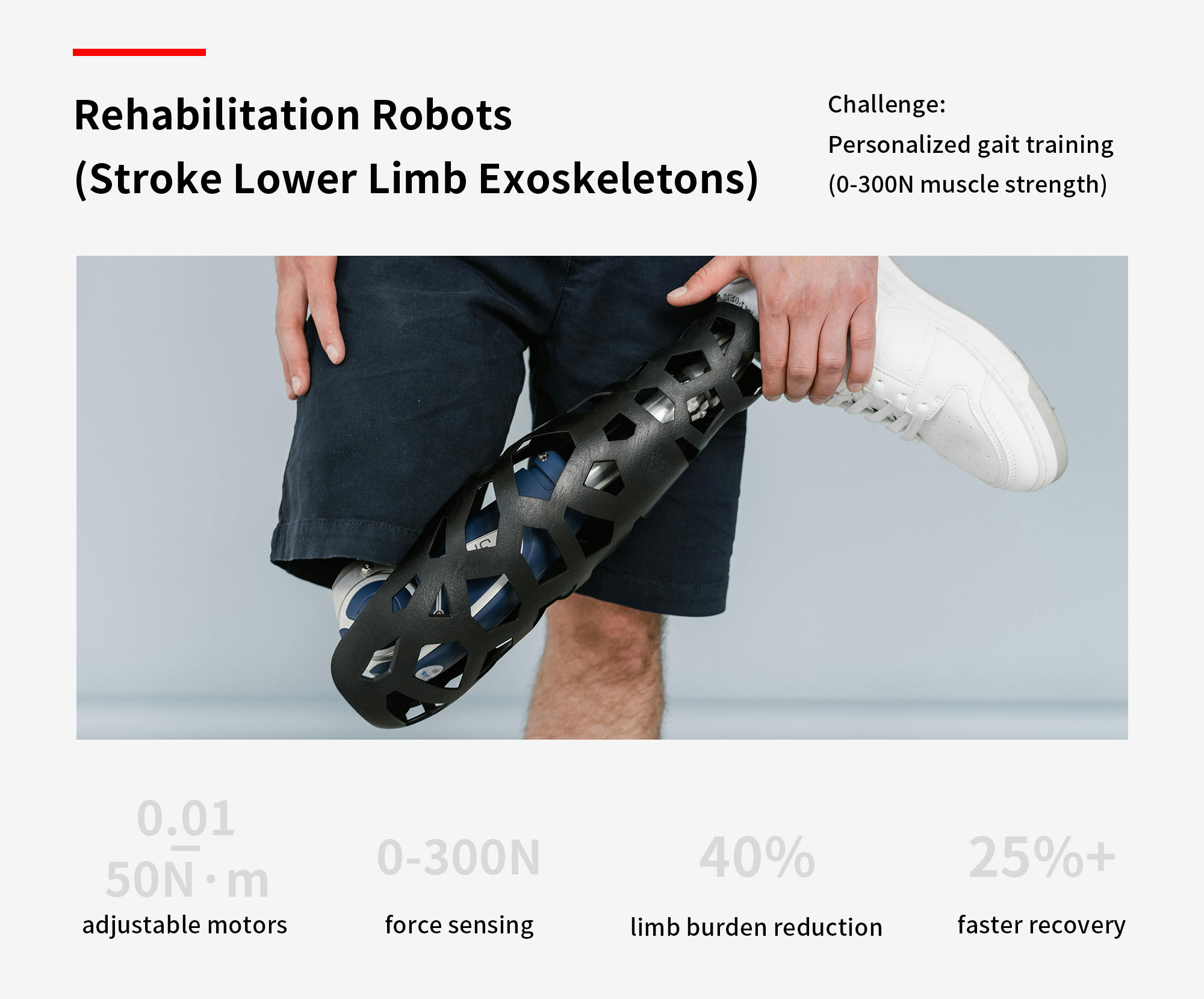
Medical rehab


As a trusted joint motor manufacturer, JEO offers precision-engineered motors—including brushless DC motors, servo motors, and frameless torque motors—designed for humanoid robot & motor systems and assisted medical surgery. Their high torque, compact size, and precise control solve core challenges in both fields.
- High torque density robot joint systems (80N·m torque, <0.1° backlash) for hips/knees/ankles.
- Shoulder joint motor and direct drive linear and rotary motors for balance.
- Performance: 5-30cm step adjustment, 0.3s terrain response, stable on 15° slopes.
Dexterous Manipulation (Robot Hands)
- Mini DC hollow cup motors (Φ18×40mm) and coreless motors for finger joints (0-120° movement, 0.2° precision).
- Stepper motors for 5-500g force feedback; 3 grip modes (delicate/standard/firm).

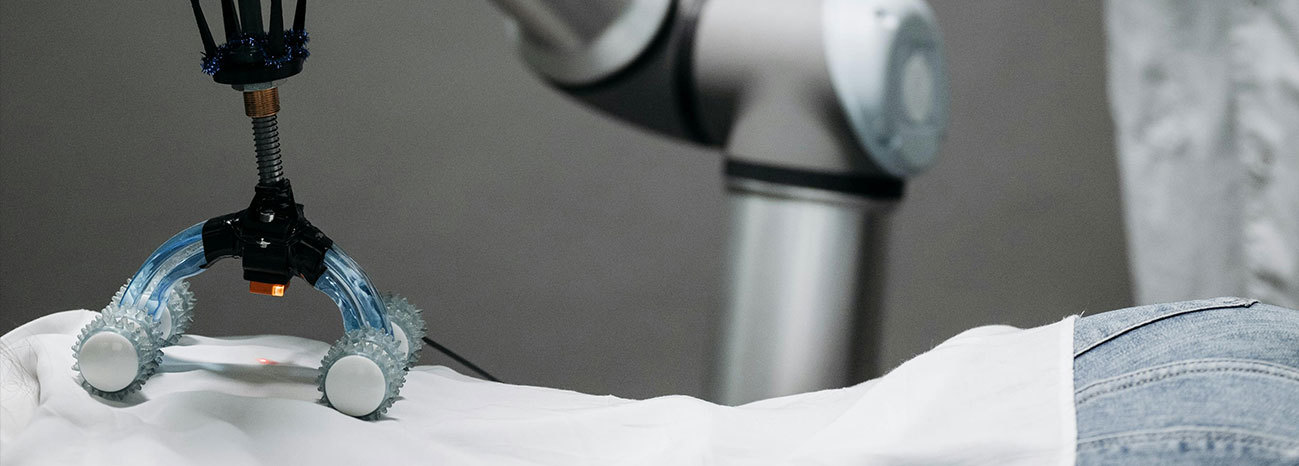
Assisted Medical Surgery Applications
Robotic Surgery Systems
- Multi-port surgery: Rotary actuator joint module and AC motors power multi-axis robot arms.
- Single-incision surgery: Compact gear motor and brushless DC motors fit tools through small incisions.
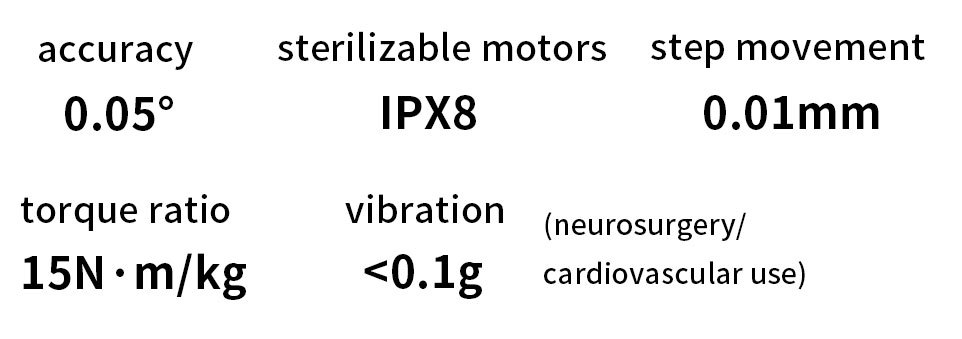
Minimally Invasive Surgery
- Servo motors (0.01° accuracy) for precise instrument control.
- Bionic robot joint motor mimics human hand dexterity; force sensors prevent organ damage.

Future Upgrades
- AI Integration: Smart motors for real-time gait optimization (robots) and tissue recognition (surgery).
- Miniaturization: Smaller coreless motors for micro-surgical robots.
- IoT Connectivity: Link to motor systems for remote monitoring.

JEO’s joint motors—from humanoid robot joint motor to harmonic robot joint actuator—enhance humanoid robot performance and surgical safety. Explore our solutions to power your innovation.







+86 18024704963
Building 2 , No.2, Guanzhang Road, Shijing Section,Dongcheng District , Dongguan City , Guangdong Province.